ITストラテジスト 2023年 午後1 問04
モーションシミュレータの事業展開に関する次の記述を読んで、設問に答えよ。
F社は、センサや筐体、機械製品などを対象とした実験・試験装置の設計、製造販売、据付工事を行うメーカーで、動揺や振動を模擬するモーションシミュレータを主力製品としている。
モーションシミュレータは、対象品に対し、外部から動きを与える装置である。
F社のモーションシミュレータは、台を支持する6本の電動シリンダを伸縮させることで、台に載せた対象品に対して前後(X軸)、左右(Y軸)、上下(Z軸)方向の動きと、左右方向の傾き(ロール)、前後方向の傾き(ピッチ)、左右方向の回転(ヨー)の、空間6自由度の動きを自在に作り出す装置である。
F社のモーションシミュレーターを図1に示す。
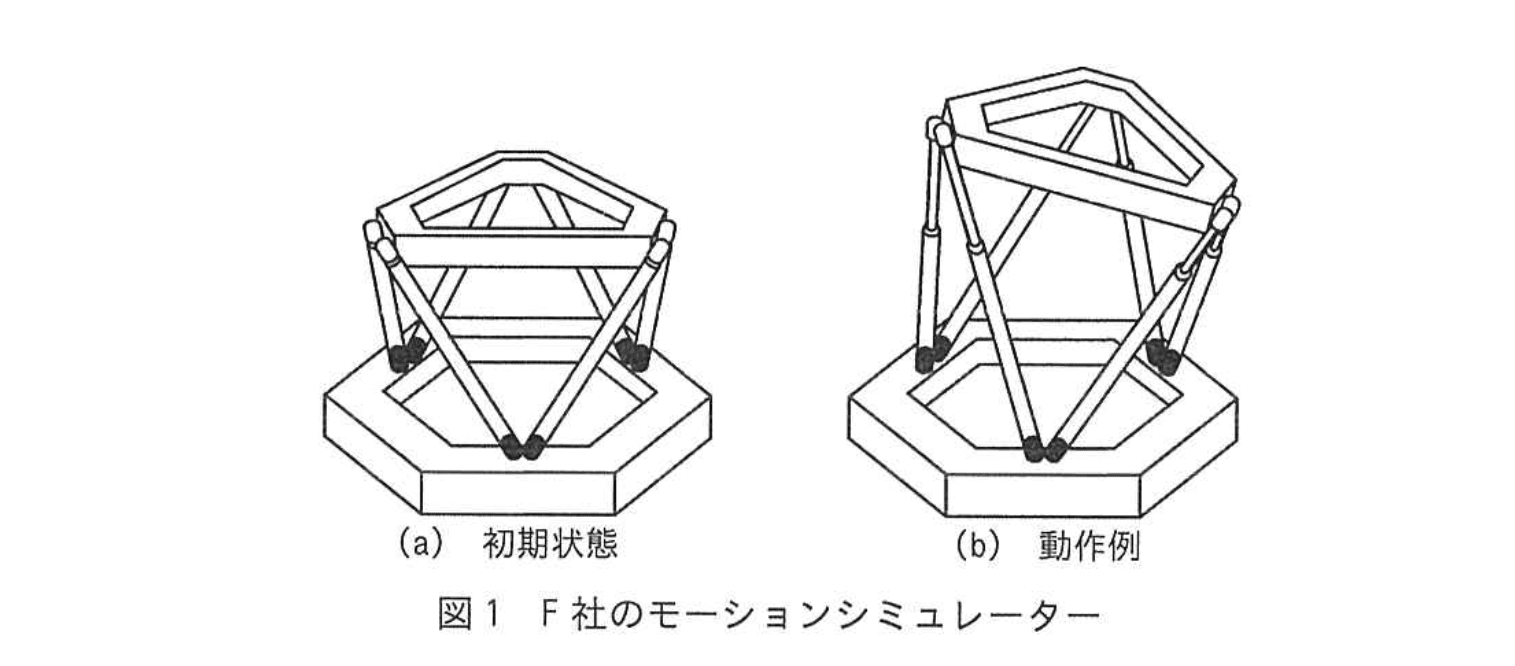
F社のモーションシミュレータは、最大搭載質量500kgの比較的小型の製品であり、ジャイロセンサや慣性センサなどの性能計測と校正、及び筐体や機械製品などの強度計測を目的とした実験・試験装置で、設定したシナリオに従って台を動かす機能をもち、自由度と精度の高さで他社に秀でている。
F社は、今後見込まれる市場の要求を分析して、保有技術を生かした新たな製品を開発して市場に投入することで、より高い業績を目指すことを方針とした。
〔モーションシミュレータの役割〕
一般的にモーションシミュレータは、開発用と訓練用に分けられる。
開発用のモーションシミュレータは、性能の検討や設計上のデータを得るために用いられる。ただし、近年は、現実の世界をモデル化し、コンピュータ上でシミュレーションして設計上のデータを得る手法で開発を進めることが多い。空飛ぶクルマなど、今後実現される製品の多くはコンピュータ上のシミュレーションによって開発が進められるものと考えられている。
訓練用のモーションシミュレータは、実物では技術的又は経済的に困難な条件を何度も自由に再現でき、実物での訓練よりも経済面・安全面で勝るので、航空機の操縦訓練やレーシングドライバーの養成などに活用される例が多い。
航空機の訓練用モーションシミュレータは、航空機メーカーが重工業メーカーと協業して開発したものが多く、航空機メーカーと重工業メーカーの保有技術に基づいた歴史ある製品となっている。
自動車の訓練用モーションシミュレータは、一般の運転者向けの製品は例が少ないが、レーシングドライバーやレーシングゲーム愛好者が車の性能を限界まで引き出す運転技術を磨くことを目的とした製品があり、自由度と精度は限定的であるが、運転者が行った操作の体感へのフィードバックなど、車種ごとの性能や特徴を訴える機能を備えている。
〔市場分析〕
F社の IT ストラテジストであるB氏は、自社の方針に従い、保有技術が生かせると見込まれる市場を調査した結果、政府が “空の移動革命に向けたロードマップ”を示したことで、2020年代後半から急速に輸送サービスの最大が想定される空飛ぶクルマの市場が、F社の新たな事業領域として有望と考えた。そして、現時点で想定される空飛ぶクルマに期待される構想と活用シーンを調べ、次に示すとおり整理した。
(1) 空飛ぶクルマに期待される構想
・2030年代頃に、操縦者不要な自動操縦機の実用化することが想定される。
・自動操縦機の実用化では、操縦支援を受けながら、操縦者の操縦で飛行する必要があり、専用の操縦免許が設定される見込みである。
・空飛ぶクルマでは、機種ごとに操縦方法や性能・特性が異なるので、操縦免許は機種ごとに限定する方向で政府が検討を進めている。
・操縦者が搭乗する空飛ぶクルマには、旅客輸送で操縦者が搭乗して操縦する場合と、荷物輸送で操縦者が遠隔から操縦する場合が想定されている。
・旅客輸送で操縦者が搭乗して操縦する場合は、空間6自由度に対する精度の高い操縦が求められると想定される。
・荷物輸送で操縦者が遠隔から操縦する場合は、飛行時間の多くを占める巡航を自動操縦にすることを前提に、離着陸時などは1人の操縦者で複数の空飛ぶクルマを切り替えながら、視覚情報だけを基に操縦することも想定されている。
・航続時間1時間程度、飛行速度100km/時程度の性能を想定している。
(2) 空飛ぶクルマに期待される活用シーン
・都市内の移動では、地上の道路の混雑に対して、空を飛ぶことによって信号待ちや渋滞を避けることができ、短時間での移動が可能となる。
・離島や山間地域など、過疎地で公共交通機関を維持できない地域が増えているが、そうした場所でも必要時に容易に過疎地の人の移動が可能となる。
・災害時・緊急時には、医者や被災者、急病人やけが人、物資などを運ぶ活用シーンも期待されている。
B氏が調べたところ、現在、災害時・緊急時に活用されている消防防災ヘリ及びドクターヘリの航続時間は2.5時間程度、飛行速度230km/時程度の性能で、厳しい気象条件と場所での運用も強いられている。特に、突風や視界不良などの厳しい気象条件における姿勢維持や不特定の場所における離着陸では、視界手だけでなく、機体の移動や動揺を体感しながら操縦する必要があり、対応できる操縦技能の高い操縦士が不足していることと、操縦士の配備にコストが多く掛かっていることが分かった。
市場分析の結果、B氏は、空飛ぶクルマの操縦訓練をするためのモーションシミュレーターを新製品として開発することが良いと考えた。
また、B氏は、消防防災ヘリ及びドクターヘリに加えて、空飛ぶクルマを災害時・緊急時を想定したシーンに活用する場合は、その特性を考慮すると、現在の消防防災ヘリ及びドクターヘリよりも多くの拠点に配備される必要があると考えた。
〔要求仕様の定義〕
B氏は、空飛ぶクルマの訓練用モーションシミュレーターに対する機能・要求を分析し、次のように整理した。
・視界だけでなく、機体の移動や動揺も体感しながらの訓練ができること
・操縦者の操縦結果を、視覚情報や空間6自由度の動きに加え、操縦桿やペダルなどの操縦装置の反力にもフィードバックすること
・空飛ぶクルマの機種ごとの性能・特性を再現できること
〔製品技術の分析〕
B氏は、システムアーキテクトのC氏に、空飛ぶクルマの訓練用モーションシミュレーターの開発に必要と考える技術の分析を依頼した。
C氏は分析結果を次のようにまとめて報告した。
・視界はARゴーグルを用いれば体感させることができる。
・機体の移動や動揺を体感させるようにするには、実機と同じ操縦席及び操縦装置をF社のモーションシミュレーターに載せて動かせばよい。
・空飛ぶクルマの機種ごとの性能・特性を再現するために設計上のデータが必要だが、空飛ぶクルマにモーションシミュレーターで外力を与え、空飛ぶクルマなどのような反応、挙動を示すかを計測して設計上のデータを得ようとすると相当時間が掛かる。
・操縦者の操縦結果を、視覚情報や移動、動揺に加え、操縦桿やペダルなどの操縦装置の反力に与えるためのフィードバックの制御技術の開発は、F社では難しい。
〔新製品の検討〕
B氏は、F社の新製品として、空飛ぶクルマの開発を進めているメーカーとの協業、及びレーシングゲーム用のモーションシミュレーターを作る国内メーカーとの技術提携を前提として、空飛ぶクルマの操縦訓練をするためのモーションシミュレーターを開発する事業提案を取りまとめた。
B氏は、今後見込まれる市場の要求として操縦訓練をするためのモーションシミュレーター以外に空飛ぶクルマの荷物輸送の遠隔操縦システムもあると分析したが、F社の保有技術を生かせないと考え新製品の対象から外した。
〔将来の事業展開〕
B氏は、将来の発展的な製品として、空飛ぶクルマの操縦訓練をするためのモーションシミュレーターに機能を加え、災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを考えた。
B氏は、災害時・緊急時を想定した空飛ぶクルマの活用における遠隔操縦は、操縦者不要な自動操縦の実用化に至った後も残ると考え、将来の事業展開の方針として、災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを開発し、販売することにした。また、災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを販売することで、現在の市場における問題を改善できると考えた。
設問1:〔市場分析〕について答えよ。
(1)B氏が、市場分析の結果、空飛ぶクルマの操縦訓練をするためのモーションシミュレーターを新製品として開発することがよいと考えるに至った、F社製品の技術面の特徴は何か。25字以内で答えよ。
模範解答
自由度と精度の高さで他社に秀でている。
解説
解答の論理構成
- 問題は「F社製品の技術面の特徴」を尋ねています。
- 技術面の特徴は【問題文】中の製品紹介部分に記載されています。
- 「F社のモーションシミュレータは、…設定したシナリオに従って台を動かす機能をもち、自由度と精度の高さで他社に秀でている。」
- さらに市場側の要求として、
- 「旅客輸送で操縦者が搭乗して操縦する場合は、空間6自由度に対する精度の高い操縦が求められる」
とあり、F社製品の「自由度」と「精度」という強みが訓練用途と合致します。
- 「旅客輸送で操縦者が搭乗して操縦する場合は、空間6自由度に対する精度の高い操縦が求められる」
- したがって、B氏が自社技術を生かせると判断した決め手は、まさに上記引用部です。
- よって解答は「自由度と精度の高さで他社に秀でている。」となります。
誤りやすいポイント
- 「空間6自由度」をそのまま書き、精度を忘れる。
- 「高精度・高自由度」といった言い換えをして引用条件を満たさない。
- 「最大搭載質量500kg」や「ARゴーグル」を特徴と誤認する。
- 「他社に秀でている」を省略し技術的優位性を示せない。
FAQ
Q: 「自由度と精度」はどちらも解答に入れないといけませんか?
A: はい。引用箇所で両方が強調されており、訓練シミュレータに必要な要件でもあるため両者が揃って初めて技術面の特徴といえます。
A: はい。引用箇所で両方が強調されており、訓練シミュレータに必要な要件でもあるため両者が揃って初めて技術面の特徴といえます。
Q: 具体的に何自由度なのかまで書く必要は?
A: 問題は「特徴」を25字以内で答える要求であり、「空間6自由度」自体は引用部に含まれていないため不要です。
A: 問題は「特徴」を25字以内で答える要求であり、「空間6自由度」自体は引用部に含まれていないため不要です。
Q: 他社比較が要点ですか?
A: はい。「他社に秀でている」という表現により、F社の相対的優位を示している点がB氏の判断材料になっています。
A: はい。「他社に秀でている」という表現により、F社の相対的優位を示している点がB氏の判断材料になっています。
関連キーワード: 6自由度, モーションシミュレータ, 精度, フィードバック制御, 市場分析
設問1:〔市場分析〕について答えよ。
(2)B氏が、空飛ぶクルマを災害時・緊急時を想定したシーンに活用する場合は現在の消防防災ヘリ及びドクターヘリよりも多くの拠点に配備される必要があると考えたのはなぜか。40字以内で答えよ。
模範解答
消防防災ヘリ及びドクターヘリに比べ、航続時間が短く速度が遅いから
解説
解答の論理構成
- 空飛ぶクルマの性能
・B氏は「航続時間1時間程度、飛行速度100km/時程度の性能を想定している。」と整理しています。 - 現行ヘリコプタの性能
・B氏が調べた消防防災ヘリ及びドクターヘリは「航続時間は2.5時間程度、飛行速度230km/時程度の性能」であると記載されています。 - 性能比較から導ける運用上の課題
・空飛ぶクルマは現行ヘリに比べて「航続時間が約2.5分の1、速度が約2分の1」と短く遅いことになります。
・同じエリアをカバーし迅速に出動させるには、1機当たりの活動半径が小さい空飛ぶクルマをより多くの地点に配備しなければなりません。 - 以上より、B氏が「現在の消防防災ヘリ及びドクターヘリよりも多くの拠点に配備される必要がある」と判断した理由は、空飛ぶクルマの「航続時間が短く速度が遅いから」です。
誤りやすいポイント
- 「航続時間」と「飛行速度」の両方を比較対象に含めず、片方だけで理由付けしてしまう。
- 「厳しい気象条件」や「操縦士不足」といった他の問題点を主因と誤解し、拠点数の議論と混同する。
- 現行ヘリの性能値を取り違え、空飛ぶクルマの方が優れていると誤読してしまう。
FAQ
Q: 災害時用に高性能な空飛ぶクルマを開発すれば拠点を増やさなくても済みますか?
A: 性能向上で活動半径を広げれば拠点数を減らせますが、コスト・技術課題や法規制も絡むため、単純には解決できません。
A: 性能向上で活動半径を広げれば拠点数を減らせますが、コスト・技術課題や法規制も絡むため、単純には解決できません。
Q: 「速度」より「航続時間」の方が重要ではないのですか?
A: どちらも重要です。遅いと現場到着が遅れますし、航続時間が短いと途中で給油・充電が必要になり、いずれもカバーエリア縮小につながります。
A: どちらも重要です。遅いと現場到着が遅れますし、航続時間が短いと途中で給油・充電が必要になり、いずれもカバーエリア縮小につながります。
Q: 拠点増設以外の解決策はありますか?
A: 交換式バッテリーステーションの設置や空中給電なども考えられますが、現在は技術・運用面で実用段階に至っていません。
A: 交換式バッテリーステーションの設置や空中給電なども考えられますが、現在は技術・運用面で実用段階に至っていません。
関連キーワード: 航続時間, 飛行速度, カバレッジ, モビリティ, 災害対応
設問2:〔新製品の検討〕について答えよ。
(1)B氏が、F社の新製品を開発するに当たり、空飛ぶクルマの開発メーカーとの協業を前提とした技術面の目的は何か。20字以内で答えよ。
模範解答
設計上のデータを得るため
解説
解答の論理構成
-
協業先の明示
【問題文】には「空飛ぶクルマの開発を進めているメーカーとの協業…を前提」とあります。したがって協業相手は“空飛ぶクルマ開発メーカー”です。 -
協業が必要になる技術課題の抽出
C氏の分析で「空飛ぶクルマの機種ごとの性能・特性を再現するために設計上のデータが必要だが…相当時間が掛かる」と指摘しています。F社単独ではデータ取得が困難であることが明言されています。 -
協業の目的の特定
上記課題を解決する手段として、開発メーカーと組むことで「設計上のデータ」を直接入手できる点が協業の主眼だと導けます。 -
結論
協業の技術面の目的は「設計上のデータを得るため」となります。
誤りやすいポイント
- 協業目的を「フィードバック制御技術の開発」と誤解する
→ フィードバック制御の難しさは「レーシングゲーム用モーションシミュレーターを作る国内メーカーとの技術提携」に対応しています。 - C氏の「相当時間が掛かる」を“時間短縮”と抽象的にまとめる
→ 何を短縮するのかが曖昧になり減点対象です。 - 協業相手をゲーム系メーカーと混同する
→ 問われているのは空飛ぶクルマ側の協業です。
FAQ
Q: 設計上のデータを自社試験で取得する方法はないのですか?
A: C氏が述べたように「モーションシミュレーターで外力を与え…計測して設計上のデータを得ようとすると相当時間が掛かる」ため、現実的ではありません。
A: C氏が述べたように「モーションシミュレーターで外力を与え…計測して設計上のデータを得ようとすると相当時間が掛かる」ため、現実的ではありません。
Q: 協業すればフィードバック制御技術も同時に解決できますか?
A: フィードバック制御は別途、レーシングゲーム用シミュレータメーカーとの技術提携で補完するとB氏が整理しています。開発メーカーとの協業はあくまで設計データ取得が目的です。
A: フィードバック制御は別途、レーシングゲーム用シミュレータメーカーとの技術提携で補完するとB氏が整理しています。開発メーカーとの協業はあくまで設計データ取得が目的です。
Q: 設計上のデータとは具体的に何を指しますか?
A: 機体質量分布、揚力・抗力係数、推進出力特性など“機種ごとの性能・特性”を数値化したデータです。これがないと正確な動揺再現はできません。
A: 機体質量分布、揚力・抗力係数、推進出力特性など“機種ごとの性能・特性”を数値化したデータです。これがないと正確な動揺再現はできません。
関連キーワード: シミュレーション, データ取得, 協業戦略, 自由度制御, フィードバック制御
設問2:〔新製品の検討〕について答えよ。
(2)B氏が、レーシングゲーム用のモーションシミュレーターを作る国内メーカーとの技術提携を前提とした技術面の理由は何か。35字以内で答えよ。
模範解答
フィードバックの制御技術の開発はF社では難しいから
解説
解答の論理構成
- 【製品技術の分析】には、C氏の報告として
“・操縦者の操縦結果を、視覚情報や移動、動揺に加え、操縦桿やペダルなどの操縦装置の反力に与えるためのフィードバックの制御技術の開発は、F社では難しい。”
と明記されています。 - B氏は【新製品の検討】で“レーシングゲーム用のモーションシミュレーターを作る国内メーカーとの技術提携を前提”にしています。
- レーシングゲーム向け機器は、操縦装置に対して反力(フォースフィードバック)を返す技術を既に持っています。
- したがって、F社が不得手とする“フィードバックの制御技術”を補完することが技術提携の狙いとなり、設問の答えは
“フィードバックの制御技術の開発はF社では難しいから”
となります。
誤りやすいポイント
- 「視界はARゴーグルで体感できる」という記述に注目し過ぎて、映像系の理由と混同する。
- “操縦装置の反力”というキーワードを読み落とし、単に“動揺を体感させるため”と答えてしまう。
- “レーシングゲーム用”から“ゲームのシナリオ作成技術”を想起し、シミュレーションソフト開発が目的と誤解する。
FAQ
Q: なぜレーシングゲーム用メーカーが選ばれたのですか?
A: レーシングゲーム用モーションシミュレータはハンドルやペダルに正確な反力を返す製品で実績があり、F社が苦手とする“操縦装置へのフィードバック制御”技術を保有しているためです。
A: レーシングゲーム用モーションシミュレータはハンドルやペダルに正確な反力を返す製品で実績があり、F社が苦手とする“操縦装置へのフィードバック制御”技術を保有しているためです。
Q: F社が自前でフィードバック制御を開発する選択肢はないのですか?
A: 可能性はありますが、C氏が“F社では難しい”と判断したように開発コスト・期間・ノウハウ習得のハードルが高く、既存メーカーと提携した方が早期市場投入に有利だからです。
A: 可能性はありますが、C氏が“F社では難しい”と判断したように開発コスト・期間・ノウハウ習得のハードルが高く、既存メーカーと提携した方が早期市場投入に有利だからです。
Q: 反力フィードバックは空飛ぶクルマの訓練で本当に必要ですか?
A: はい。操縦桿やペダルに加わる力は機体挙動を感じ取る重要な感覚情報であり、これを再現できないと実機に近い訓練効果が得られません。
A: はい。操縦桿やペダルに加わる力は機体挙動を感じ取る重要な感覚情報であり、これを再現できないと実機に近い訓練効果が得られません。
関連キーワード: フィードバック制御, アクチュエータ, ヒューマンインタフェース, シミュレーションモデル, 協業
設問2:〔新製品の検討〕について答えよ。
(3)B氏が、F社の保有技術を生かせないと考え新製品の対象から外した理由となる、空飛ぶクルマの荷物輸送の遠隔操縦システムの特徴は何か。25字以内で答えよ。
模範解答
・視覚情報だけを基に操縦する。
・操縦に移動の体感が不要
解説
解答の論理構成
- 問題文には、荷物輸送時の遠隔操縦について
“離着陸時などは1人の操縦者で複数の空飛ぶクルマを切り替えながら、視覚情報だけを基に操縦することも想定されている。”
と明記されています。 - F社の強みは“空間6自由度の動きを自在に作り出す装置”であり、身体へ動揺を与えるモーションフィードバックです。
- ところが遠隔操縦では“視覚情報だけを基に操縦”するため、モーションフィードバックを必要としません。
- 従って、F社の主力技術を活用できず新製品対象から外れた理由は「視覚情報のみで操縦する点」にあります。
▶ 解答例
視覚情報だけを基に操縦する遠隔操作
視覚情報だけを基に操縦する遠隔操作
誤りやすいポイント
- 「巡航を自動操縦にする」部分に注目し過ぎて、視覚情報のみという本質を見落とす。
- 「複数機を切り替えながら」をキーワードにしてしまい、本問の聞きたい“保有技術が生かせない”視点を外してしまう。
- “訓練用モーションシミュレータ”と混同し、体感が不要である事実を忘れる。
FAQ
Q: なぜ“体感が不要”と書くだけでも正解になるのですか?
A: モーションシミュレータの価値は体感を与えることにあります。体感が不要=F社技術が不要、と論点が一致するためです。
A: モーションシミュレータの価値は体感を与えることにあります。体感が不要=F社技術が不要、と論点が一致するためです。
Q: 「視覚情報だけ」を答える際に具体例(カメラ映像など)を書いた方が良いですか?
A: 必要ありません。“視覚情報だけ”というキーワードで十分に特徴を示しています。
A: 必要ありません。“視覚情報だけ”というキーワードで十分に特徴を示しています。
Q: 自動操縦の有無は解答に含めるべきでしょうか?
A: 本問は“F社の保有技術が生かせない理由”を問うており、その直接要因は「視覚情報のみ」で操縦する点なので、自動操縦の記載は必須ではありません。
A: 本問は“F社の保有技術が生かせない理由”を問うており、その直接要因は「視覚情報のみ」で操縦する点なので、自動操縦の記載は必須ではありません。
関連キーワード: HMI, 遠隔操縦, モーションフィードバック, 要件定義
設問3:〔将来の事業展開〕について答えよ。
(1)B氏が、災害時・緊急時を想定した空飛ぶクルマの活用における遠隔操縦は、操縦者不要な自動操縦の実用化に至った後も残ると考えたのはなぜか。30字以内で答えよ。
模範解答
・厳しい気象条件と場所での運用を強いられるから
・機体の移動や動揺を体感しながら操縦する必要がある。
解説
解答の論理構成
- 災害・緊急運用の現状
【問題文】には、現在の消防防災ヘリやドクターヘリについて
「厳しい気象条件と場所での運用も強いられている」
とあります。空飛ぶクルマが同じ用途で使われる場合も、この前提は変わりません。 - 体感を伴う高度な操縦技能の必要性
同じ段落で
「機体の移動や動揺を体感しながら操縦する必要があり」
と記述されています。視覚情報だけでは不十分で、操縦者が“揺れ”を感じ取りながら姿勢を保つ技能が求められます。 - 自動操縦が普及しても残る課題
いくら「操縦者不要な自動操縦機」が実用化されても、突風・視界不良といった極端条件では自律制御だけでは対応しきれず、人間が介入して機体挙動を細かく補正する場面が残ると推論できます。 - したがって、遠隔操縦訓練は恒常的ニーズ
上記①②③を踏まえると、“自動操縦後も遠隔操縦の訓練は不要にならない”という結論に至り、設問の理由は
「厳しい気象条件と場所での運用があり、機体の移動や動揺を体感しながら操縦する必要がある」
となります。
誤りやすいポイント
- 「自動操縦=全面無人運用」と早合点し、人間の介入が完全になくなると思い込む。
- 理由を一つだけに絞り「厳しい気象条件」または「体感操縦」どちらかしか書かない。両方が根拠です。
- “運用コスト”や“操縦士不足”を主因と誤解し、設問が問う“残る理由”とのずれで減点。
FAQ
Q: 自動操縦機の実用化後、人は監視だけで十分ではないのですか?
A: 「突風や視界不良など」の極端条件では自律制御が破綻しやすく、最終的に人が“揺れ”を感じながら姿勢を保つ必要が残ると示唆されています。
A: 「突風や視界不良など」の極端条件では自律制御が破綻しやすく、最終的に人が“揺れ”を感じながら姿勢を保つ必要が残ると示唆されています。
Q: なぜ「視覚情報だけ」の遠隔操縦では足りないのですか?
A: 体感重視の操縦では、加速度・揺れを感じ取って微調整するためです。これが「機体の移動や動揺を体感しながら操縦する必要」という記述につながります。
A: 体感重視の操縦では、加速度・揺れを感じ取って微調整するためです。これが「機体の移動や動揺を体感しながら操縦する必要」という記述につながります。
Q: 訓練用モーションシミュレーターの強みは?
A: 空間6自由度と高精度動作により、現場と同じ“揺れ”を再現し、体感型の遠隔操縦訓練が可能になる点です。
A: 空間6自由度と高精度動作により、現場と同じ“揺れ”を再現し、体感型の遠隔操縦訓練が可能になる点です。
関連キーワード: 自動操縦, 遠隔操縦, モーションフィードバック, 人間機械系, 災害対応
設問3:〔将来の事業展開〕について答えよ。
(2)B氏が、災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを販売することで改善できると考えた現在の市場における問題は何か。35字以内で答えよ。
模範解答
災害時・緊急時に対応できる操縦技能の高い操縦士の不足
解説
解答の論理構成
- 問題は「災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを販売することで“改善できると考えた”現在の市場における問題」を問うています。
- 該当箇所は〔市場分析〕の次の記述です。
――「特に、突風や視界不良などの厳しい気象条件における姿勢維持や不特定の場所における離着陸では、視界手だけでなく、機体の移動や動揺を体感しながら操縦する必要があり、対応できる操縦技能の高い操縦士が不足していることと、操縦士の配備にコストが多く掛かっていることが分かった。」 - B氏は訓練用システムで「操縦技能」を高め、上記の“不足”を解消しようとしています。
- よって問題として取り上げられているのは、引用文のうち「対応できる操縦技能の高い操縦士が不足していること」です。
- 以上より解答は「災害時・緊急時に対応できる操縦技能の高い操縦士の不足」となります。
誤りやすいポイント
- 「コスト」の方に着目してしまい、“操縦士の配備コストが高いこと”と書くミス。
- 「操縦士が不足している」とだけ書き、どのような条件に対応できる操縦士かを明示しないミス。
- 「遠隔操縦者」と誤解し、現状は“遠隔操縦者”が不足していると書くミス。
FAQ
Q: “配備コスト”も問題だと書かれているのに、なぜ不足を選ぶのですか?
A: B氏が訓練用システムで直接改善できるのは操縦技能の向上による人材不足の解消であり、コストは副次的効果に過ぎないためです。
A: B氏が訓練用システムで直接改善できるのは操縦技能の向上による人材不足の解消であり、コストは副次的効果に過ぎないためです。
Q: 「高い操縦技能」の部分は必須ですか?
A: はい。引用文で不足しているのは単なる操縦士ではなく「対応できる操縦技能の高い操縦士」だからです。
A: はい。引用文で不足しているのは単なる操縦士ではなく「対応できる操縦技能の高い操縦士」だからです。
Q: 「災害時・緊急時」の前置きは必要ですか?
A: 必要です。問題が想定しているシーンを限定する語句なので、省くと文意が変わる恐れがあります。
A: 必要です。問題が想定しているシーンを限定する語句なので、省くと文意が変わる恐れがあります。
関連キーワード: モーションシミュレータ, 遠隔操縦, 訓練システム, 人材不足, 市場分析